High-Precision Technology for Racing
Formula Student is a competition that emphasizes technical expertise and innovation. At DHBW Engineering Stuttgart, we strive to develop cutting-edge solutions each year to compete at the highest level in this demanding environment. For the current season, we have integrated the OMS Race Sensor from Sensoric Solutions into our vehicle, elevating our data quality and vehicle control to new heights.
Precise Data for Optimal Vehicle Control
Our vehicle’s advanced control system depends on real-time data to achieve optimal torque distribution and traction control. However, the previous optical measurement technology, had reached its limits—particularly during rapid speed changes and when measuring the slip angle (β). By adopting the OMS Race Sensor, we overcame these challenges and achieved significant performance enhancements.
Seamless Installation and Integration
The installation of the OMS Race Sensor in our vehicle was smooth and hassle-free. Connecting the sensor to the CAN bus was straightforward, thanks to the included DBC file. Having prepared our own DBC file based on past experiences, we were keen to compare it with the official version. Both worked seamlessly, showcasing the sensor’s compatibility.
One key advantage of the OMS Race Sensor is its sampling frequency of 1 kHz, which aligns perfectly with the frequency of our internal Extended Kalman Filter (EKF). This compatibility eliminated the need for additional data interpolation, resulting in a marked improvement in data quality.
Performance Across Operating Modes
The OMS Race Sensor provides three distinct operating modes:
- Pure Optical Mode: Delivers measurement values similar to the the previous optical sensor, but with enhanced resolution and a higher dynamic range.
- Optical Priority Mode: Combines optical measurements with an initial IMU-based plausibility check.
- Optimal Sensor Fusion: Utilizes the integrated IMU to fuse sensor data, producing virtually noise-free signals.
The Optimal Sensor Fusion mode proved to be particularly advantageous, minimizing signal noise and enabling precise detection of rapid speed changes. These characteristics enhanced the performance of our control system without the need for additional external filters.
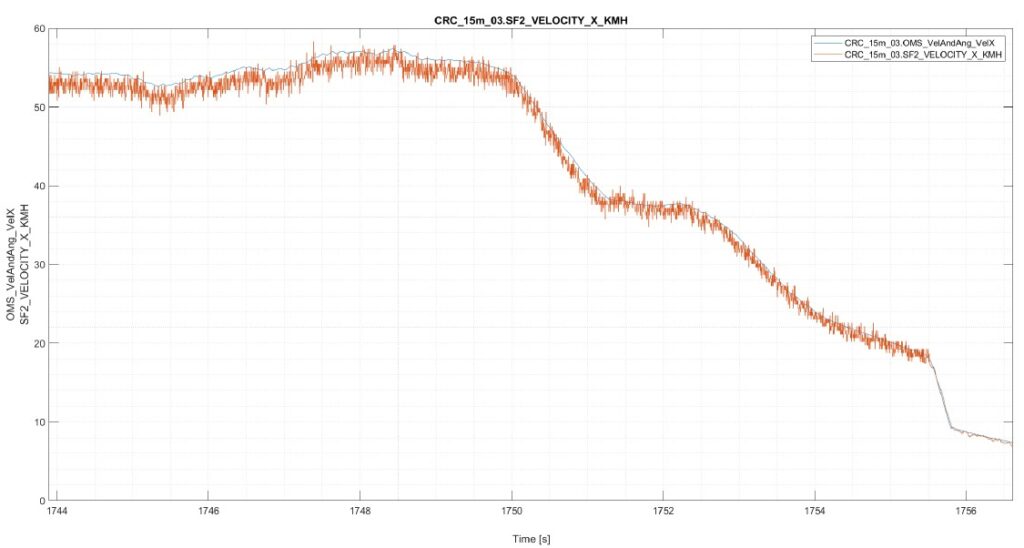
Comparison of OMS Race with the previous optical sensor technology
System Adaptations
Integrating the OMS Race Sensor required only minimal adjustments:
- Sensor Plausibility Check: We adapted the logic to account for the new noise characteristics.
- EKF Optimization: The high data quality of the OMS Race Sensor allowed us to adjust the EKF weighting in favor of the sensor, improving the overall filter performance.
Practical Experience and Benefits
The advantages of the OMS Race Sensor were most evident in dynamic driving situations and during rapid surface transitions. While the previous optical sensor occasionally experienced data dropouts under these conditions, the OMS sensor consistently delivered stable and reliable measurements.
The improved signal dynamics and reduced noise contributed to more precise traction and stability control, enabling finer control of the vehicle’s performance.
Conclusion
The OMS Race Sensor has exceeded our expectations, proving to be an invaluable addition to our vehicle. Its combination of easy integration, high sampling frequency, and flexible operating modes makes it indispensable for teams requiring precise and dynamic measurement data. Compared to the previous optical sensor technology, the OMS sensor offers clear advantages, particularly in scenarios demanding precision speed measurements and adaptability to changing driving conditions.
Author: Benni Stauder, Technical Projekt Manager, DHBW Engineering Stuttgart
![]()